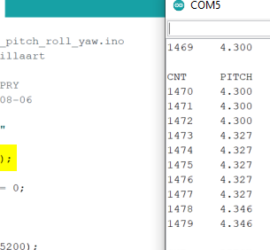
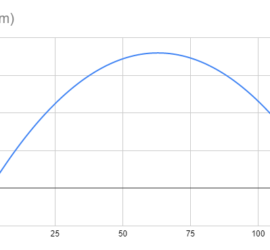
To point something at something consistently over time you need a way to determine where it is pointed, a way to point where it’s wanted and a way to determine how fast it needs to change. In this case it is a rocket that needs to be pointed upwards. We’ll […]
esp32
4 posts
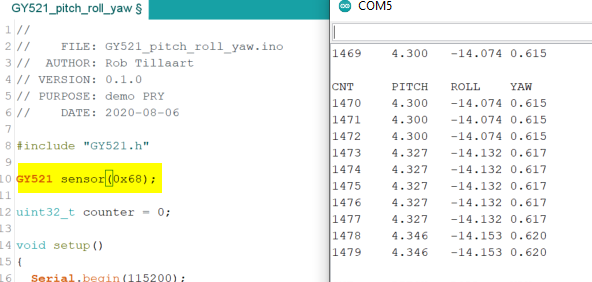
I’m working on making a simple flightcontroller for a model rocket, and I thought it would be nice to use the LoRa32 board I had laying around. It has lots of computing power (compared to atmega328p on my arduinos) and even support multithreading, which I looked forward to testing out […]
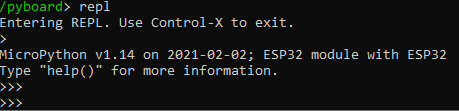
I’ve been using arduino for a while, and allthough I like it for what it is, I have fallen a little head over heels with python! So, when I finally found micropython and had an ESP32-board laying around, it was time to take the step into the big boy league […]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
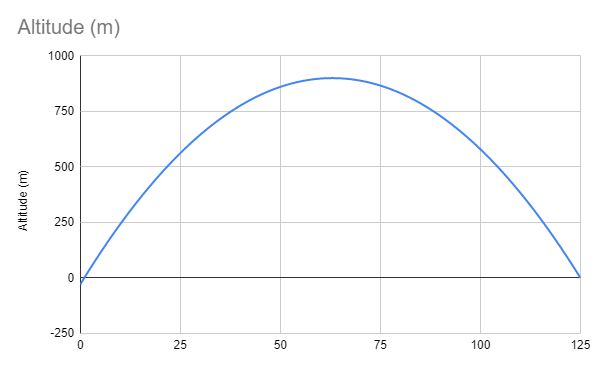
I’m trying to make a simple flight controller for a model rocket, and after some frustration around accelerometers and fin-controlling servos (another post coming on that later) I figured out I could work on a different phase of the flight instead: detecting the apex of the trajectory. To do that […]